روبوت الفهد الصياد
الهندسة والآليات >>>> الروبوتات
تم حفظ حجم الخط المختار
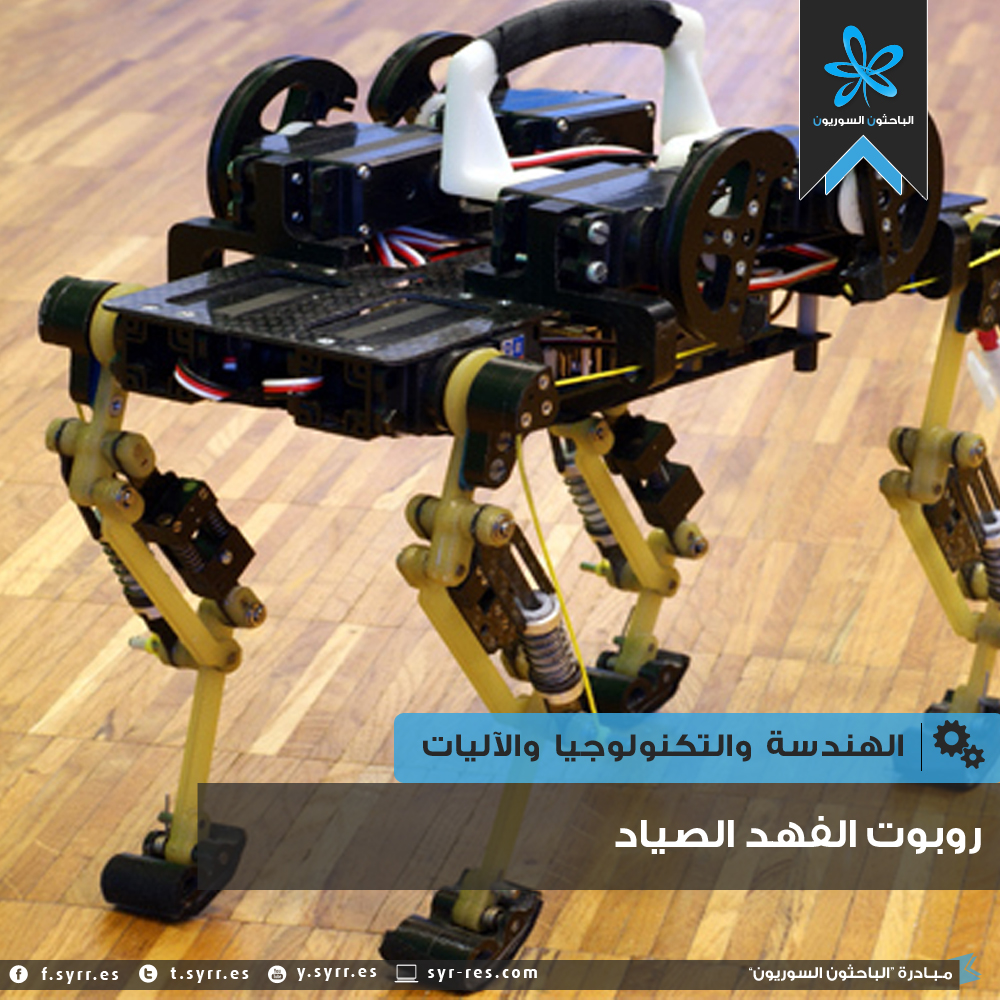
هذا أسرع روبوت رباعي الأرجل من حجمه، بالرغم أنه ما يزال لا يطابق نفس مرونة القطة الحقيقية. الهدف الرئيسي من هذا الروبوت هو تطوير شيء ما يمثل بشكل دقيق حركات القطة الحقيقية لاستخدامه في البحث وعمليات الإنقاذ وعمليات استكشافية أخرى.
لمزيد من المعلومات من المصدر: هنا
حقوق الصورة: هنا
مصدر الصورة : هنا
مواضيع مرتبطة إضافية
المزيد >


تفاصيل
08-11-2013
1155
المساهمون في الإعداد
إعداد:
Mamdouh Sukkar
تدقيق علمي ونشر:
Amer Saleh
تعديل الصورة:
Yosef Agha